The skyline32 runs the open-source Cleanflight flight control (FC) software which has an ever-growing community of friendly developers and users. Being open-source means that you too can contribute to the system.
Selling points:
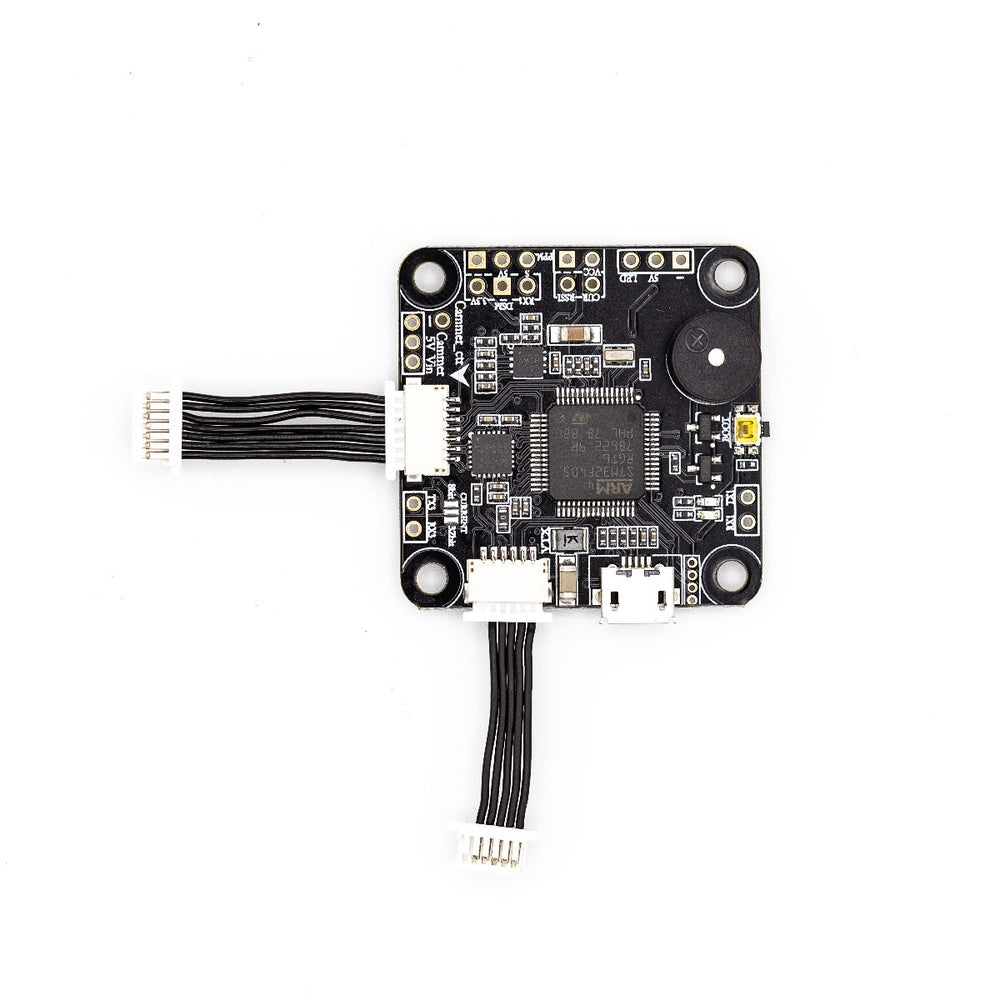
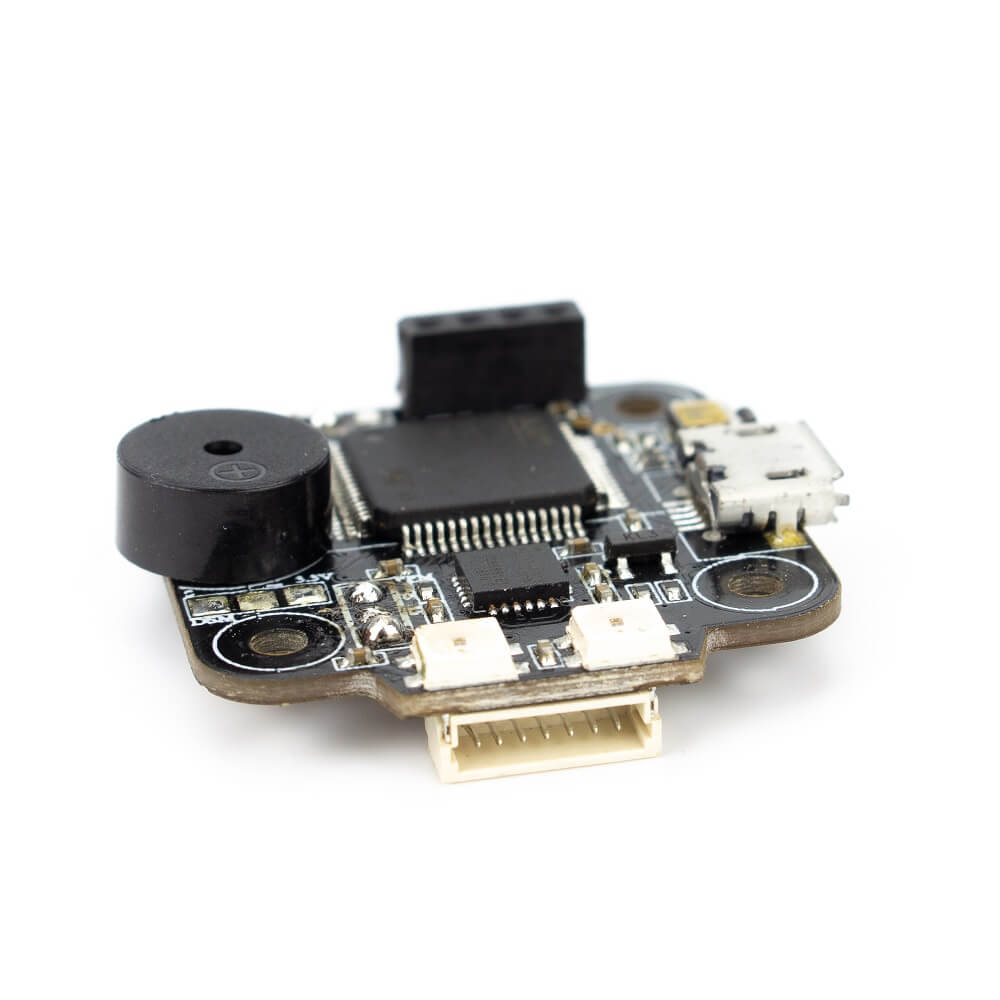
Cleanflight & Baseflight supported. (SKYLINE32 is loaded with Baseflight-Configurator)
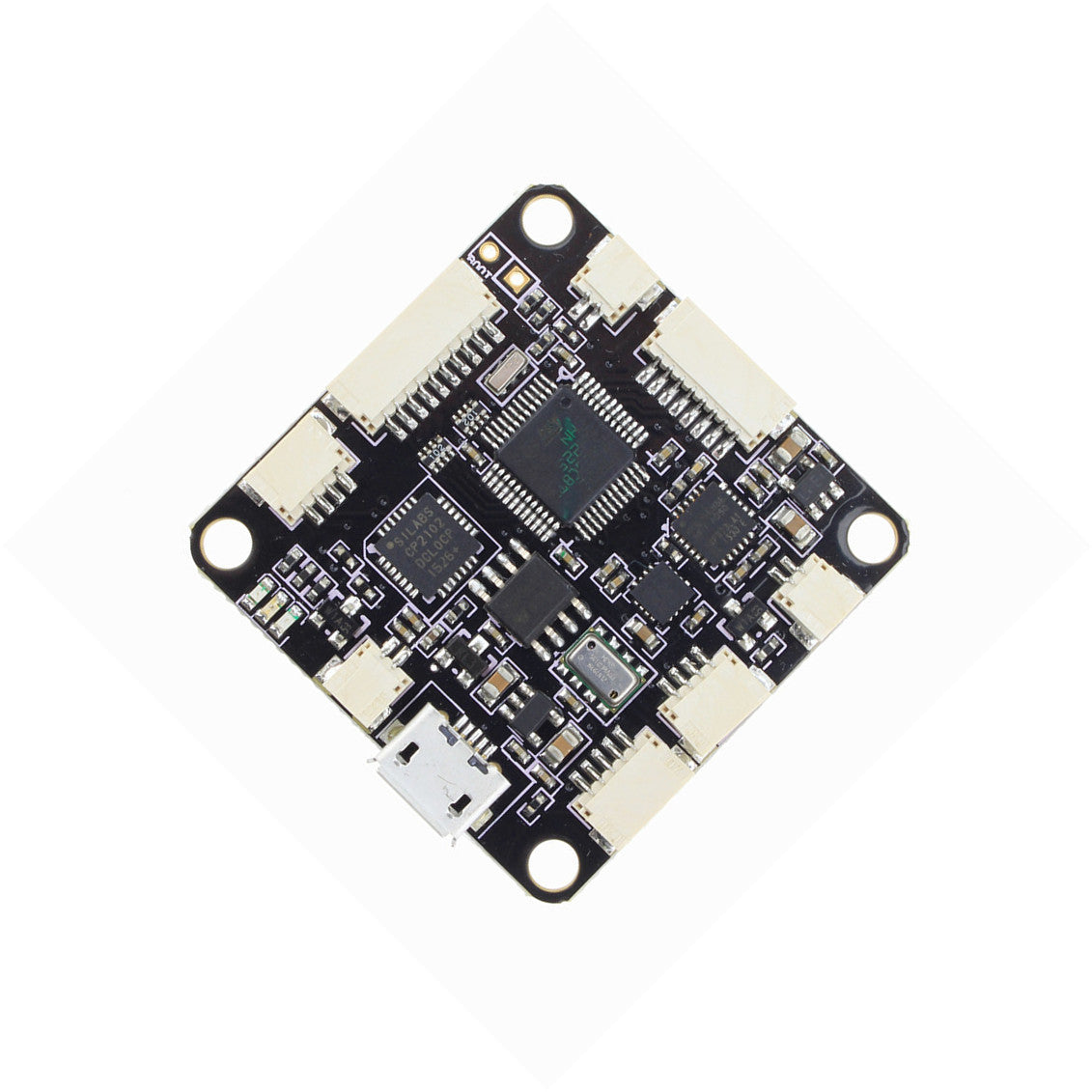
Unique wire-to-board connectors, wiring easier!
Thin and light design, reducing overall weight saving mounting space!
With compass sensor, no deviation!
Barometer, Black box included
Adapting high quality electronic components & high precision SMT.
Features
32-bit ARM micro processor running at 3.3V / 72MHZ.
Manual mode, Angle mode, Horizon mode, heading hold mode, head-free mode, Altitude hold mode (this mode is available in advanced version)
GPS position hold / “Go home” function(GPS Optional).
Specification: Dimension: 35mm x 35 mm x 5 mm (30.5mm Mounting) Weight: 5.4g (W/O wires)
Included:
1x SKYLINE32 Advanced V2
2x RC breakout cable
Note: SKYLINE32 hardware is compatible with NAZE32 firmware, including cleanflight, baseflight. Below are the links to the source codes:
https://github.com/cleanflight/cleanflight
https://github.com/multiwii/baseflight
SKYLINE32 is loaded with baseflight and Baseflight-Configurator GUI. This manual is a baseflight Setup Tuning Guide for SKYLINE32. If you are using cleanflight firmware, please refer to the below link to download and install cleanflight Configurator: https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon
Note: with firmware and configuration based on “MultiWii” software, the processor used is not Atmel AVR, and can not be compiled via Arduino or other AVR tools.
Below is some information about STM32 development: http://code.google.com/p/afrodevices/wiki/STM32Development







 https://github.com/cleanflight/cleanflight
https://github.com/cleanflight/cleanflight
 https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon
https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon